![[기초] 2. Optimization최적화기법/최적화: 매개변수 초기화 및 갱신](https://img1.daumcdn.net/thumb/R750x0/?scode=mtistory2&fname=https%3A%2F%2Fblog.kakaocdn.net%2Fdn%2FbfSLMb%2Fbtrp8qzeLKz%2FU5Gc8KXhhTLdZAZRzmAAr0%2Fimg.png)
이 글은 필자가 "밑바닥부터 시작하는 딥러닝 1"을 보고 헷갈리는 부분이나 다시 보면 좋을만한 부분들을 위주로 정리한 글입니다.
🪀 해결이 되지 않은 부분
Gradient Descent vs. Stochastic Gradient Descent- GD: 전체 데이터 update
- SGD: Batch 기준으로 데이터 update

https://seamless.tistory.com/38
- Loss function의 derivation이 잘 와닿지 않음/그래프 양상 이해안감.

🪀 최적화Optimization 틀
: 최적의 매개변수 구하기 = 매개변수를 갱신해가면서 최적의 매개변수를 찾는다.
- 결과에 따른 손실 함수(Loss function): 전체 퍼셉트론 결과에 따른 손실을 구하는 것을 말한다.
- 매개변수/가중치 갱신
- 매개변수 초깃값 설정
- 오차역전법으로 가중치 매개변수의 기울기 계산
- 기울어진 방향으로 가중치의 값을 갱신
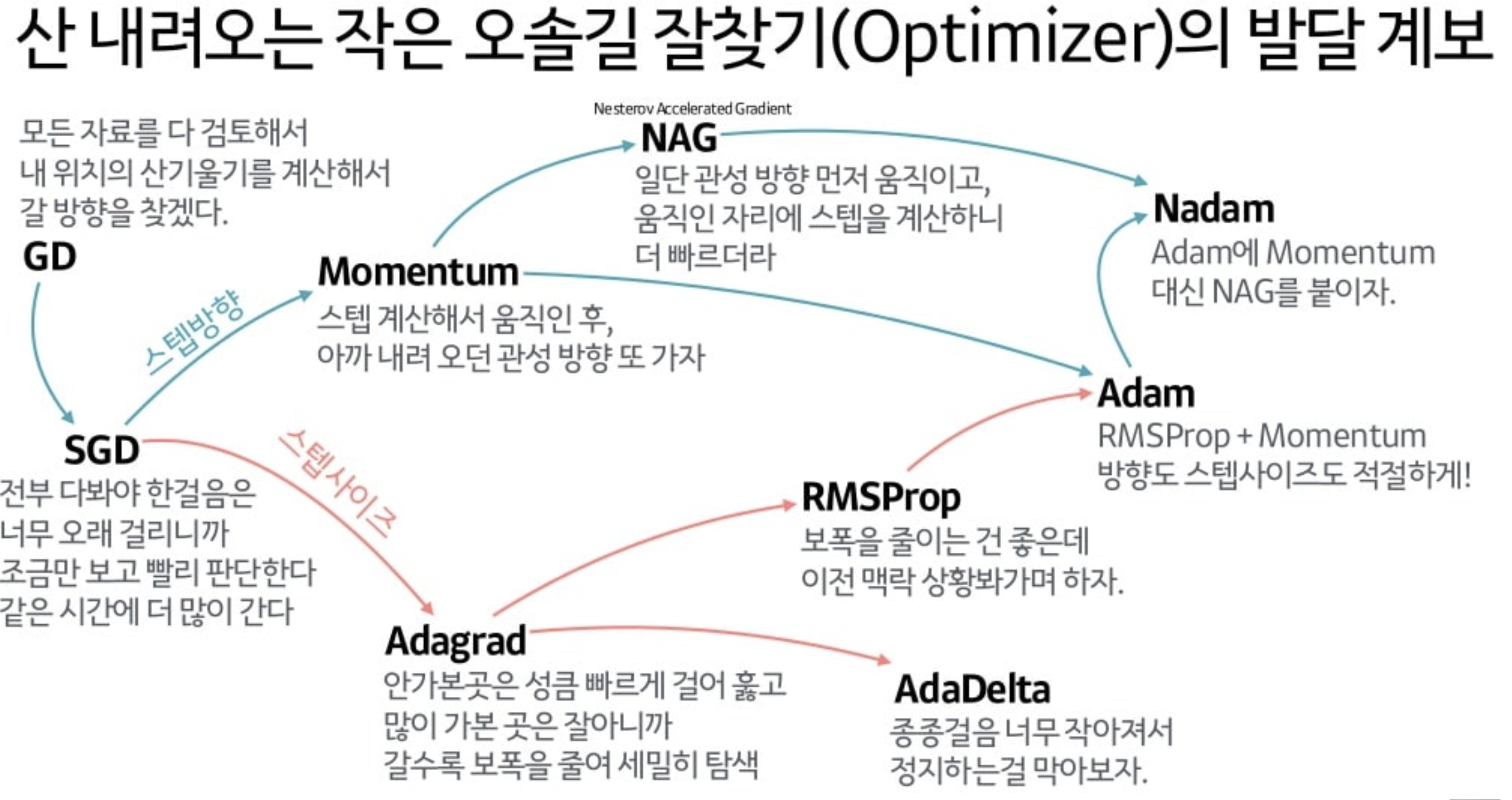
🪀 최적화Optimization 방법론
- 매개변수 초깃값 방법론
- Xavier 초깃값
- He 초깃값
- 매개변수 갱신 방법론
- 이동관점
- Stochastic Gradient Descent(SGD)
- Momentum
- 학습률 감소 관점: AdaGrad
- 이동 + 학습률 감소 관점: Adam
- 요즘: 일반적으로 SGD, Adam
- 이동관점
🪀 매개변수 초깃값 설정
가중치의 대칭적인 구조를 무너뜨리려면 초깃값을 무작위로 설정해야 한다.
- Xavier 초깃값: 각 층의 활성화값들을 광범위하게 분포시킬 목적으로 가중치의 적절한 분포 착지, Sigmoid나 tanh 등의 S자 모양 곡선
- 앞 계층의 노드가 n개라면 표준편차가 1/(n)^(1/2)인 분포 사용 (xavier_normal_, xavier_uniform_이 존재한다.)
def initialize_weights(self):
# track all layers
for m in self.modules():
if isinstance(m, torch.nn.Conv2d):
torch.nn.init.xavier_normal_(m.weight)
elif isinstance(m, torch.nn.BatchNorm2d):
torch.nn.init.xavier_normal_(m.weight)
elif isinstance(m, torch.nn.Linear):
torch.nn.init.xavier_normal_(m.weight)
if m.bias is not None:
torch.nn.init.constant_(m.bias, 0)- He 초깃값: ReLU에 특화된 초깃값
- 앞 계층의 노드가 n개라면 표준편차가 (2/n)^(1/2)인 분포 사용
🪀 매개변수 갱신
매개변수 갱신 방법론 들어가기 전...
- 학습률 감소: 학습을 진행하면서 학습률을 점차 줄어드는 방법
0. Gradient Descent(GD)
- Gradient: 경사, Derivation: 미분값
- Gradient Descent: 비용함수의 값을 극소화, 전체 데이터에 적용
- Gradient Ascent: 비용함수의 값을 극대화
- Gradient Vanishing: 미분값이 감소되면서 오히려 Gradient descent와 ascent에 도움이 되지 않는 경우가 존재한다. 대표적인 예시로는 Sigmoid function이 존재한다.
1. Stochastic Gradient Descent(SGD)
- Stochastic Gradient Descent: 배치로 작용
- 기울어진 방향으로 일정한 거리만 가겠다는 단순한 방법
- Cons
- 지그재그로 이동하는 경로가 비효율적
- 이런 경향을 나타내는 비등방성 함수에서는 탐색 경로가 비효율적

https://www.researchgate.net/figure/A-typical-energy-landscape-depicting-position-of-several-local-minima-which-indicate-the_fig3_45900660

2. Momentum
- 기울어진 방향으로
일정한 거리만 가겠다는 방법기울기에 따라 다른 이동 거리를 이야기- 모멘텀의 원리: 공이 그릇의 곡면(기울기)에 따라 구르듯 움직인다.
- Pros: 지그재그 정도가 '덜'하다.
3. AdaGrad
- 학습률 감소 관점) 매개변수 '전체'의 학습률 값을 일괄적으로 낮추는 방법, '각각의' 매개변수에 '맞춤형 값'
- h: 과거의 기울기 값을 제곱하여 계속 더하는 방식, 매개변수의 원소 중 많이 움직인 원소는 학습률이 낮아진다.
- Pros: 최솟값을 향해 효율적으로 움직임
4. Adam
- 이동 관점) 그릇 바닥을 구르는 듯한 움직임 + 학습률 감소 관점) 매개변수의 원소마다 적응적으로 갱신 정도를 조정
- Pros: 하이퍼파라미터의 '편향 보정'이 진행된다.
🪀 Sum up...
'AI, Deep Learning Basics > Basic' 카테고리의 다른 글
| (작성중) [기초] 3. Overfitting/Underfitting 및 Regularization일반화/일반화 기법 (0) | 2022.01.09 |
|---|---|
| [Probability] MLE를 통한 MAP 추론: Posterior/Prior/Likelihood -Bayes rule/Bayesian Equation (0) | 2022.01.08 |
| [기초] 1. 신경망 개요/단순 퍼셉트론/오차역전법 (0) | 2022.01.02 |
| [NN] PyTorch 함수 모음 (0) | 2021.12.29 |
| [Pytorch] 모델 만들 때 초기값을 설정해주는 이유 (0) | 2021.11.24 |